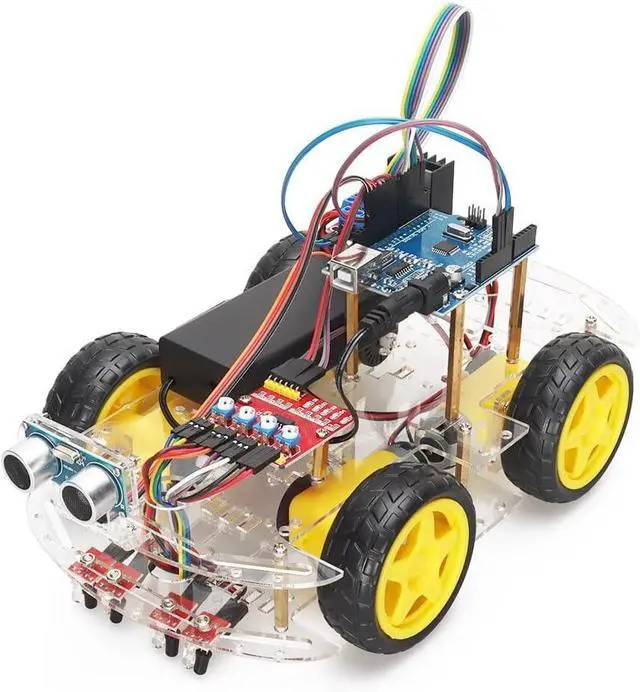
1. The main control board adopts CH340 UNO R3 development board.
2. The motor drive module uses a typical L298N module to drive a DC motor.
3. The infrared signal detection module uses four infrared light pairs to detect the black lines for tracking.
4. The ultrasonic sensor module uses the HC-SR04 module, which uses the ultrasonic ranging to measure the distance for obstacle avoidance.